2019 Destination Deep Space
|
We competed in FIRST Destination: Deep Space as a 4th year team. This year our challenge involved disk shaped game pieces called Hatches and orange playground kickballs called Cargo. During the start of the match, which was called Sand Storm, teams drove off levels 1 or 2 of the Hab Zone. Then they try to score points by shooting Cargo in the high and/or low goals, placing Hatches on the High and/or Low goals, or by placing Hatches and/or Cargo in the Cargo Ship.
After Sand Storm, teams continue to score points. At a period of the match called End Game, teams can climb to level 1, 2,or 3 of the Hab zone to score more points. For more information about the competition, watch the official FIRST Destination: Deep Space animation to the right. See below for information about the team's season and robot. |
|
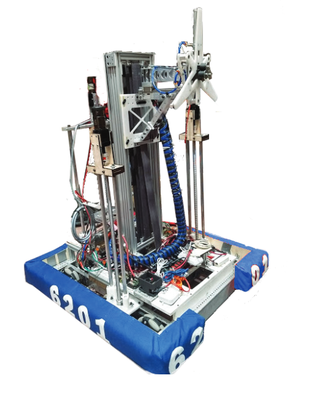
Robot name: Phasma
|
Hatch intake
The intake of Phasma is made to pick up and drop off Hatches It is made out of Delrin. The intake works by using 3 spring loaded pneumatic pistons that each have their own attachment to grab the center of the hatch. The intake is attached to the elevator with another pneumatic cylinder, so that the intake follows the rules and does not go past the robot frame perimeter until the start of the match. Elevator
Phasma’s elevator is created out of 80/20 extrusion and is a 2 stage elevator. The design was based off the team’s elevator on the 2018 Power Up robot. The width was decreased to help prevent it from being too heavy. The elevator was also placed over the center of the robot to keep the center of gravity in the middle of the robot and prevent tipping. The elevator was used to help move the intake up so we could place Hatches on different levels of the rocket. Level 2 and 3 climb
Phasma’s climber is composed of 3 different parts. There are two climbers on the front and back. Each climber contains two shafts, and a ball screw in the middle. The ball screws are connected to a 775 Pro Motor. When the button on the controlled is pressed, the motors spin the ball screws which allows us to move up and down. The back climber has 2 Stealth Wheels on the bottom that are attached to a Seat Motor, and the front Climbers have Banebots T81 Wheels, allowing the robot to drive forward onto the Hab platform. Drive train
The drive train that is used on Phasma is the Andymark Kit Of Parts drivetrain.We use 4 CIM motors for movement and the Toughbox Mini gearboxes that come with the Kit Of Parts drivetrain. For wheels, we use two 6” HiGrip Wheels on the front, two 4” Higrip Wheels in the middle, and two 6” omni wheels on the back. |
Bridgewater District NE Mass Event
This was our team's first competition of this year's season. We ranked 37th out of 40. We were able to go on to quarter finals. We ended with a record of 2-10-0.
For more information, you can check us out at The Blue Alliance
For more information, you can check us out at The Blue Alliance
Revere NE District - Greater Boston Event
This was our team's second competition this year's season. We ranked 8th place overall with a record of 9-8-0. This meant that we were able to advance to the quarter finals. We won our 2 out of 3 matches, which allowed us to advance to semi finals.
We also won the team spirit award for displaying extraordinary enthusiasm and furthering the objectives of FIRST by doing outreach in our school and our community. For more information, you can check us out at The Blue Alliance
We also won the team spirit award for displaying extraordinary enthusiasm and furthering the objectives of FIRST by doing outreach in our school and our community. For more information, you can check us out at The Blue Alliance
